![]()
![]()
![]()
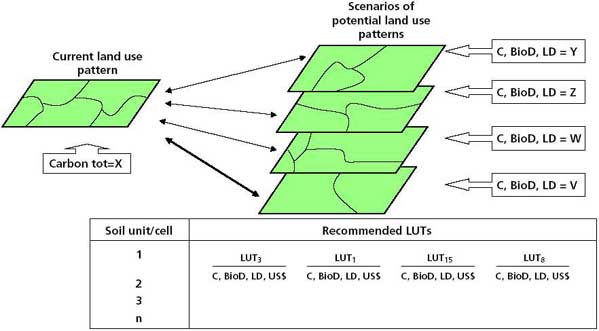
Having prepared the scenarios of the stock of C in biomass and in soil, the current status of species diversity, and the present status of land degradation, the process should move towards the integration of such scenarios and their comparison with scenarios of implementation of PLUT patterns in the area of concern. This should be done in order to determine the possible variations occurring from changes in land use in all the factors or criteria considered, namely: carbon stock and sequestration, biodiversity and land degradation. Ideally, after this exercise, the decision-makers, be they watershed planners, policy-makers in a designated government agency or farmers, should have a collection of scenarios before them (Figure 29).
The selection of the more “advantageous” scenario amounts to an exercise in multicriteria decision-making (MCDM). For the purpose of this report, the main criteria identified are: the carbon stock and sequestration potential; the status of biodiversity (constraint to plant diversity as per this exercise); and the status of land degradation and land degradation risk that can be incurred into by the proposed LUC in each planning unit (i.e. AEZ, soil unit, agro-ecological cell). Aside from these criteria, the decision-maker will have other important considerations in mind in deciding on LUCs. For example, the most obvious of these will be food security in subsistence farming. The decision-makers (in this case the farmers) would tend to minimize the risk to their families that an LUC may bring, without foregoing the perceived benefits (e.g. cash income incentives owing to accrual of carbon stocks, prevention of land degradation and its implicit yield losses due to depletion of soil fertility, etc.). Important considerations include:
the selection of an LUC scenario requires MCDM exercise;
the multiple criteria for selection should include improvements to the carbon stock and sequestration potential, biodiversity conservation and prevention of land degradation implicit in the LUC;
an indirect measure of food security, through yield improvements or increased income;
improvements to the decision variables should be extensive and long-term.
FIGURE 29 - Assessment of carbon sequestration potential, biodiversity and land degradation from LUC scenarios
Multicriteria techniques for participatory decision-making
The variety of approaches and techniques in the field of operations research, management, mathematical programming and in the recently developing field of MCDM is substantial. It is not the purpose of this report to review these approaches in order to justify the choice of approach and technique incorporated as part of the methodology proposed here. Individuals and organizations have made important contributions to the application of MCDM techniques in the land-use planning context (e.g. Romero and Rehman, 1989; El-Swaify and Yakowitz, 1998).
The FAO approach to MCDM
The approach followed by FAO in AEZs and the development of AEZWIN (Antoine, Fischer and Makowski, 1997) has provided a range of useful decision-support tools for MCDM in land-use planning. AEZWIN aims to support interactive analysis of agricultural land-use options. The AEZWIN tool is a powerful multicriteria decision-support module for optimization, based on the “aspiration-reservation” approach. AEZWIN can be used in the optimization of land-use scenarios involving interactive MCDM. However, it may be cumbersome for the casual or non-specialist user. FAO (1999) provides a detailed review of AEZWIN.
FAO has also applied other MCDM techniques in its field projects. In particular, an emerging paradigm consists of the use of goal programming to optimize, in priority sequence, individual objective functions in a set. This leads on to the application of a participatory stakeholder model, based on the analytical hierarchy process (AHP), which is used first to find out what the decision-maker’s priorities are. This approach was first used by Ponce-Hernandez (1999) in the ecological and economic zoning of an area in the Amazon basin for the Amazon Cooperation Treaty, and has been followed by the techniques applied in SIRTPLAN in Chile, Brazil and Argentina (SIRTPLAN, 2001).
In order to set up a problem for optimization and decide on which data processing tools to use, it is necessary to formulate the problem formally as an optimization problem.
Formulation of the optimization problem
The decision-making problem could be seen in terms of an optimization problem. The optimization is based on multiple criteria. The criteria are:
enhancement of carbon stock and sequestration,
conservation of biodiversity,
prevention of land degradation,
enhancement of food production (as a “proxy” for food security).
The formal declaration of the problem from the optimization standpoint leads to its mathematical formulation in terms of objectives that need to be achieved simultaneously. The multiple objectives are:
maximize the enhancement of carbon stock and sequestration;
maximize the conservation of biodiversity;
minimize land degradation;
maximize food production.
Each of these objectives can be formulated mathematically as an objective function. The problem then consists in identifying from among the LUC scenarios developed earlier (giving a finite geographical area, e.g. the watershed or farmland) the land-use pattern that achieves the multiple objectives simultaneously.
Achieving one of the objectives is a “technical” problem (i.e. demands the search for a solution among a set of feasible solutions). Attempting to achieve the multiple objectives simultaneously is an “economic” problem in that it requires the achievement of a “compromise” solution” in the “Pareto optimality” sense. This is because the objectives may contradict each other in some situations.
For each of the objectives, the optimization model can be constructed from:
decision variables. Identifying the decision variables (i.e. the area size assigned to be planted with a given LUT).
technical coefficients of each decision variable. Identifying and deriving the technical coefficients of each decision variable (by compiling pertinent socio-economic data on prices, costs, marginal productivities and marginal costs) involved in the implementation and in the derived benefits of a unit area of each LUT.
sets of constraints. Identifying and formulating the sets of constraints imposed by the biophysical and socio-economic environments and by the scarce resources. These constraints can be constructed and inserted in the model at this stage.
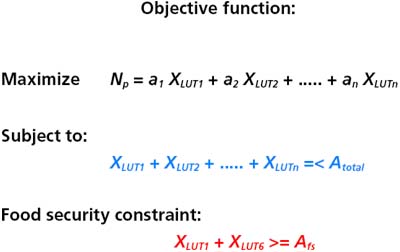
Figure 30 illustrates the formulation of an optimization model for a single objective, in this case, maximizing net profit.
In Figure 30, Np stands for net profit, while XLUT are the decision variables that represent the optimal area to be devoted to a given LUT so that the Np is maximized. The ai are the technical coefficients that represent the marginal productivity of each LUT. The parameter Atotal represents the total area involved in the planning exercise, and Afs is the minimum area to be planted with staple crops to guarantee food security. The right-hand side inequalities (i.e. Atotal and Afs) are the size of the constraints imposed on the optimization process.
FIGURE 30 - Example of the optimization model for a single objective
The essence of a Pareto optimal (PO) or “efficient” solution is that no other feasible solution can achieve the same or better performance for all criteria under consideration and strictly better for at least one criterion. Thus, a PO or efficient solution is a feasible solution for which an increase in a value of one criterion cannot be achieved without having a deleterious effect on other variables and on the solution itself. Hence, this type of solution is difficult to achieve without “trade-offs” among criteria. Such trade-offs can realistically be achieved by consultation with the stakeholders in some form of participatory process.
Establishing priorities through a participatory process - the AHP
In this methodological framework, the apparent conflicts established by competing demands for land by different LUTs, from which the decision-maker selects on the bases of multiple criteria, can be seen as a process of conflict resolution. A technique that has proved quite successful in eliciting stakeholder preferences through multiple criteria choices is the AHP, proposed first by Saaty (1980). The AHP helps in participatory MCDM by providing a mechanism to structure the land-use conflict in a watershed or area of concern around a common global goal. It does this in order to allow stakeholders to articulate their preferences, values and aspirations related to potential land-use scenarios. This process can be achieved through some form of “electronic round table” (Ponce-Hernandez, 1999). This approach has been used in the zoning of a portion of the Amazon (Ponce-Hernandez, 1999) and in land-use planning in various countries in South America (SIRTPLAN, 2001).
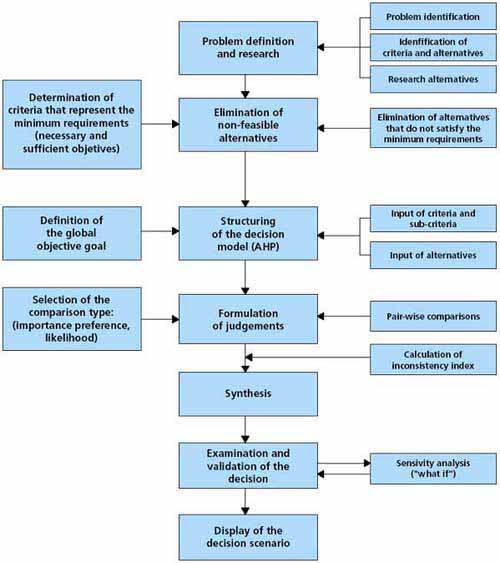
The AHP consists essentially of a piecemeal decomposition of a problem, indicated by a global goal, into its most fundamental elements and parts, including factors, forces influencing the factors, criteria (as indicated above) and alternatives (as represented by the LUC scenarios). Then, after decomposition and the “structuring” of a problem hierarchically, all solutions of subproblems are brought together into a global solution consisting of a ranking of alternatives. Figure 31 illustrates the procedure for model development in the AHP. The sequence for “structuring” a problem into a hierarchy (i.e. model building) is:
problem identification,
definition of global objective,
identification of criteria,
identification of alternatives.
In the case of the MCDM problem, all the elements can be identified and the problem modelled. Once built, a model can serve as the basis for requesting stakeholder input about their preferences, values and aspirations, while the LUC scenarios are displayed before them. Thus, after structuring the problem, pair-wise comparisons are made among all the elements of the hierarchy. It is here where the stakeholders articulate preferences or choices. Then, the elements of the preference set are evaluated and synthesized, resulting in the ranking of alternatives. This is the final result of the process. Allowance is made for sensitivity analysis after the synthesis and assignment of rankings or weights to the different nodes of the hierarchy before each alternative scenario. The results from applying the AHP model are a set of coefficients or weights: l that represents the priorities derived from stakeholder consensus as to preferences or priorities for the land-use scenarios. These weights are then used in the multiobjective optimization process to guide the priority sequence in which the objective functions should be optimized through goal programming. Figure 32 presents an example of a hierarchy with a global goal of “minimize environmental and economic conflict” for a region such as the Amazon basin.
FIGURE 31 - Procedure for model building and its application in participatory decision-making using the AHP
Multiobjective optimization
A goal programming function with multiple constraints is set up, drawing information from the economic parameters of decision variables. The goal programming model for the entire watershed or area studied meets the criteria represented by single-objective functions. These functions are built into the goal programming function by sequentially optimizing such single-objective functions in the order of priority established by consensus from the participatory process implemented through the AHP.
The goal programming model is developed by setting up goals with corresponding levels of “overachievement” and “underachievement” over the initial objective functions. It is beyond the scope of this report to explore the theoretical and mathematical details of goal programming. Readers may refer to Romero and Rehman (1989) for an example of the use of goal programming.
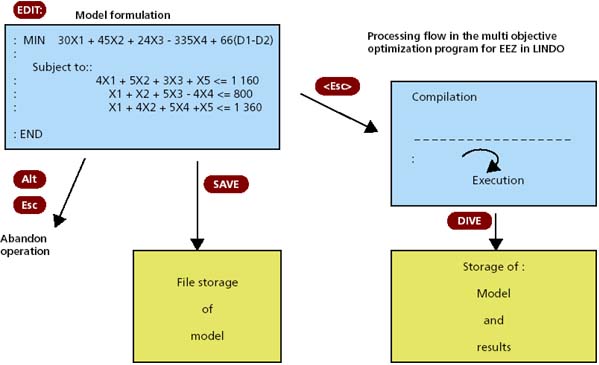
Computer software programs for solving this type of problem (known as “solvers”) are standard. Models can be developed and processed interactively using, for example, the LINDO optimization software (Lindo Systems, 1995). Figure 33 illustrates the optimal land-use scenarios developed after linking the AHP and the results of the goal programming model to the GIS. Figure 34 shows an example of the steps for processing a goal programming model with the LINDO software.
The procedures presented in the previous seven chapters describe a methodological framework that has been tested in three locations in Latin America and the Caribbean region. Results from the case studies illustrating the application of the methods described in these chapters are presented in the Appendix.
FIGURE 32 - Example of AHP model for gathering stakeholder preferences and participatory decision-making
Structure of the model built for the trial area in the Amazon. Example of structuring of a hierarchy. Global goal: "minimize environmental and economic conflict".
FIGURE 33 - Optimal LUC scenarios developed by linking the AHP and the optimization (goal programming) process to the GIS
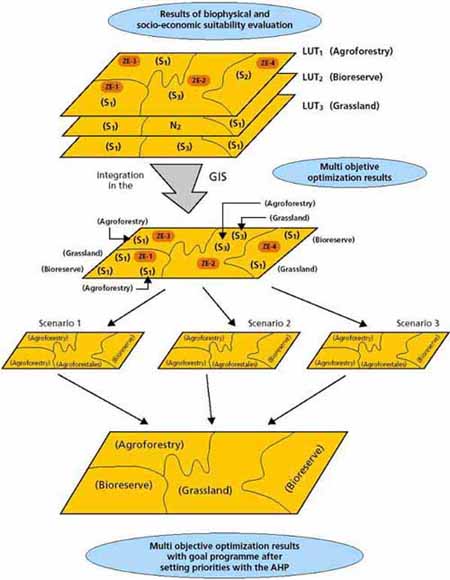
FIGURE 34 - Example of the implementation of a goal programming model with LINDO
![]()
![]()
![]()